
Concept Generation & Selection
The concept generation process began with the group brainstorming ideas that were applicable to the design of mechatronics and within the scope of the course. Each members came up with a list of potential projects inspired by previous ideas or existing products. We studied videos of previous ME102B project showcases and also generated ideas from products on Kickstarter. We came up with an automatic snake phone charger, cocktail maker, and interactive lamp, just to name a few. After each member compiled a sufficient amount of ideas, we met up and had a discussion. A more defined a concrete list was established and a few more rounds of research followed. The goal of this project is to create a fully functioning project that demonstrates the multidisciplinary field of engineering including a combination of mechanical, electrical, controls, and software components; we kept this in mind throughout the process.
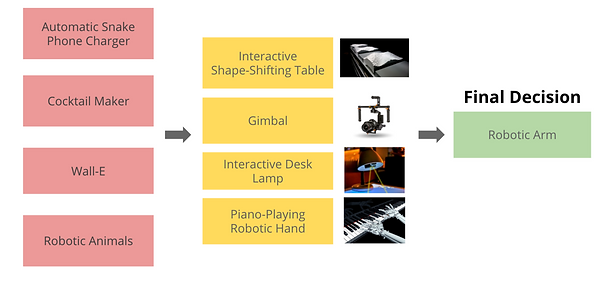
A series of generated concepts leading up to the final decision.
After narrowing down the potential projects from the initial concept generation, we ended up with interactive shape-shifting table, piano-playing robotic hand, gimbal, interactive desk lamp, and checker-playing robotic arm as our top five ideas. We then voted on each of these in detail and decided to pursue the robotic arm due to its functionality and versatility. The other ideas had their advantages; however, we ultimately thought that they were either overly complex for our abilities or too specific for the scope of this course. The shape-shifting table was a visually appealing and novel project, but would have required the implementation of VR which we have no experience with. Similarly with the piano-playing robotic hand, the project concept is fascinating, but we do not have the resources to accommodate for it. The gimbal, on the other hand, was too simple of a project for the group over the span of the semester. Even though the interactive desk lamp seemed promising, the team decided not to pursue it because it has already been made.
The checker-playing robotic arm is the winner because it demonstrates the versatility and precision of the robot arm in an interactive and fun way. After toying with some ideas and coming up with a first prototype, we confirmed that this was the route that we would take with our project.

A picture of our first prototype.